机械臂项目:一步一步指南
- 发表时间:2021-11-02 08:30:44
- 来源:本站
- 人气:986
您正在与需要高度精确性的任务作斗争吗?或者您是处理需要高精度和性能的一致和重复的操作?然后,你需要一个机械臂项目。
此外,它是一种可靠的电子多氯联苯设备,可以执行广泛的操作。因此,你会发现机器人手臂在不同的行业,如:
机器访问
实验室
工业自动化
制造业
因此,这将是一个绝妙的主意,采取机械臂项目。毫无疑问,一开始看起来很复杂,但是,随着所有材料的到位,任务将更加简单。在本文中,我们将向您提供如何构建机械臂的详细信息。
我们开始工作吧!
什么是机械臂?
工业机械臂
机械臂是指一种机械工具,您可以通过特殊软件自动实现自动化。你可以在特定的微控制器上安装特殊的软件。大多数时候,这种设备可以是类似人类的机器人的一部分,也可以是一个独立的设备。
此外,它执行的任务类型取决于手臂关节的运动。例如,你可以看到一个机械臂和机械抓地力臂与单独的关节,可以向直向移动。
如何制作简单的机械臂?
我们将向您展示如何制作一个简单的机械臂,记住动作和游戏的顺序。这就是说,让我们来看看你需要的项目组件:
面包板
面包板
木块
安装阿杜伊诺 IDE
伺服电机 (5)
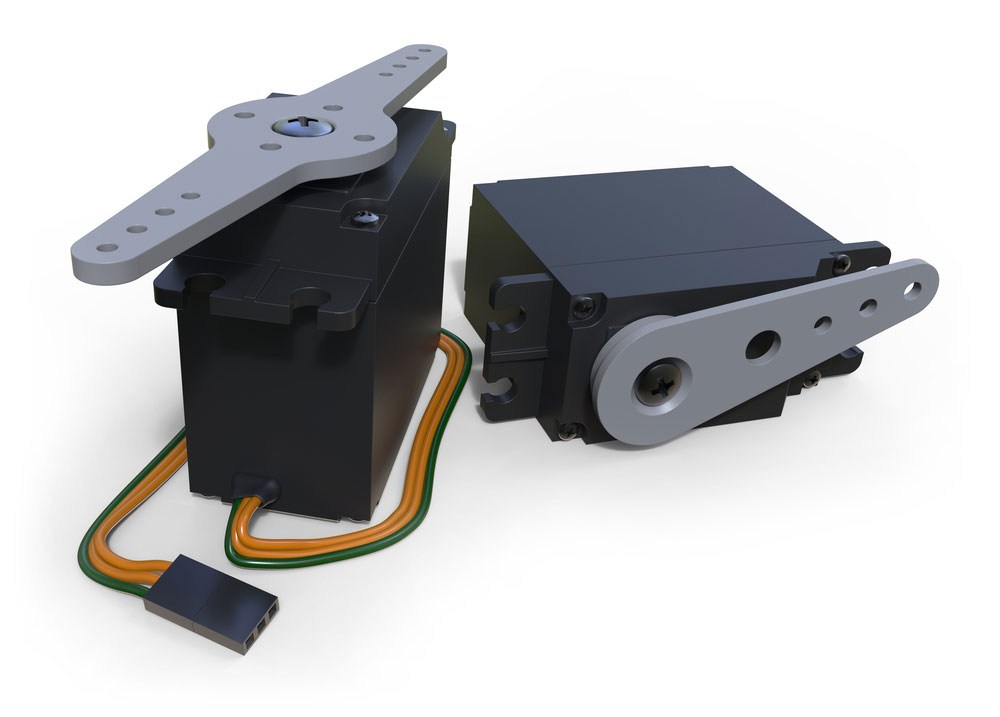
一组伺服电机
阿尔杜伊诺·乌诺
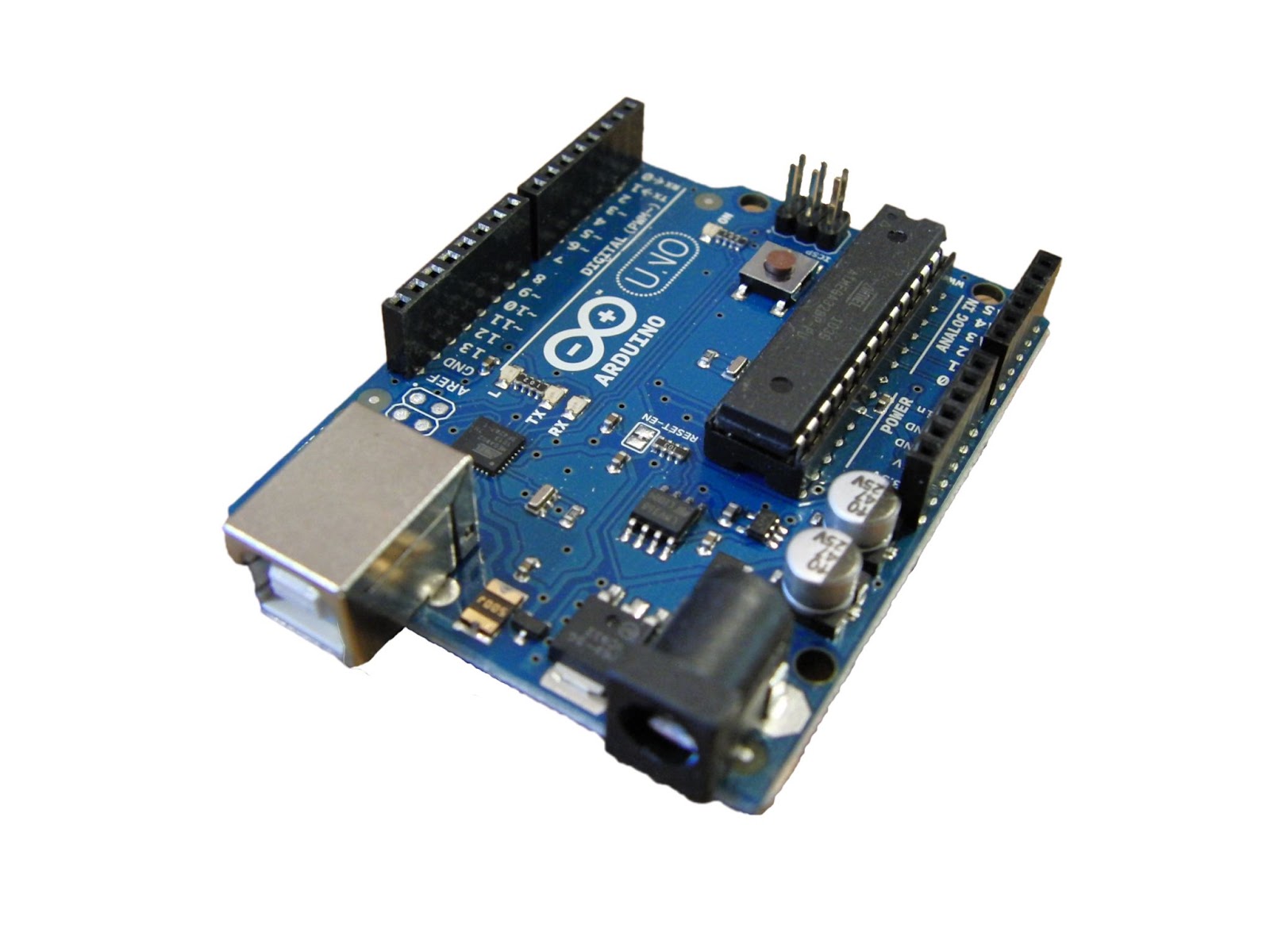
阿尔杜伊诺·乌诺
资料来源:维基共享资源
波坦蒂米(5)
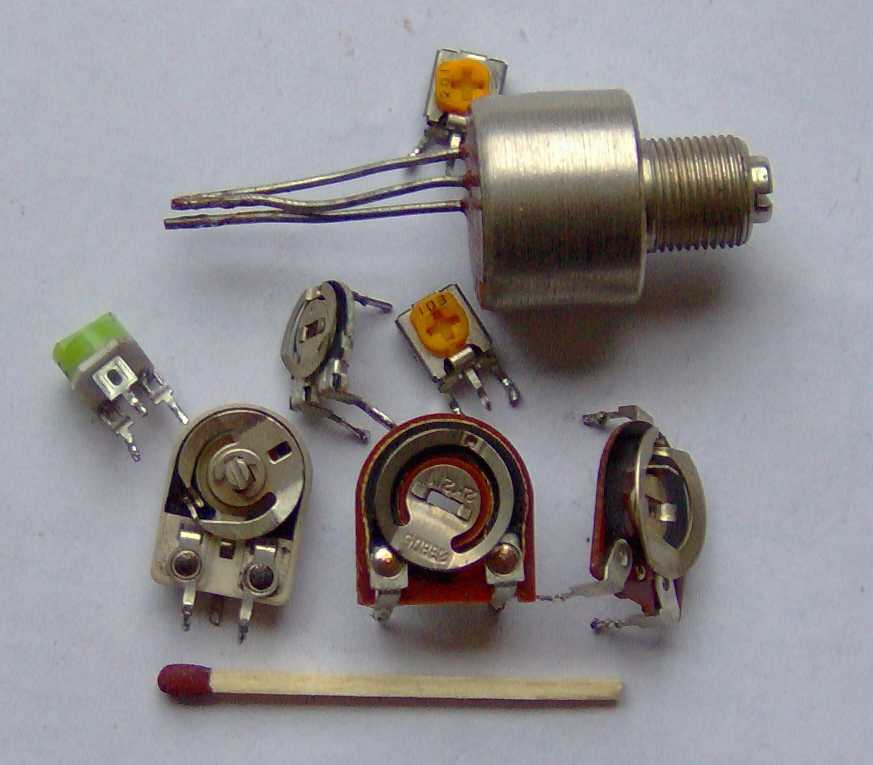
一组波坦蒂米
资料来源:维基共享资源
适配器 (5V 2A)
画布板(A4 尺寸)
信号线

信号线
考虑到这一点,您可以在以下步骤中着手构建您简单的机械臂项目:
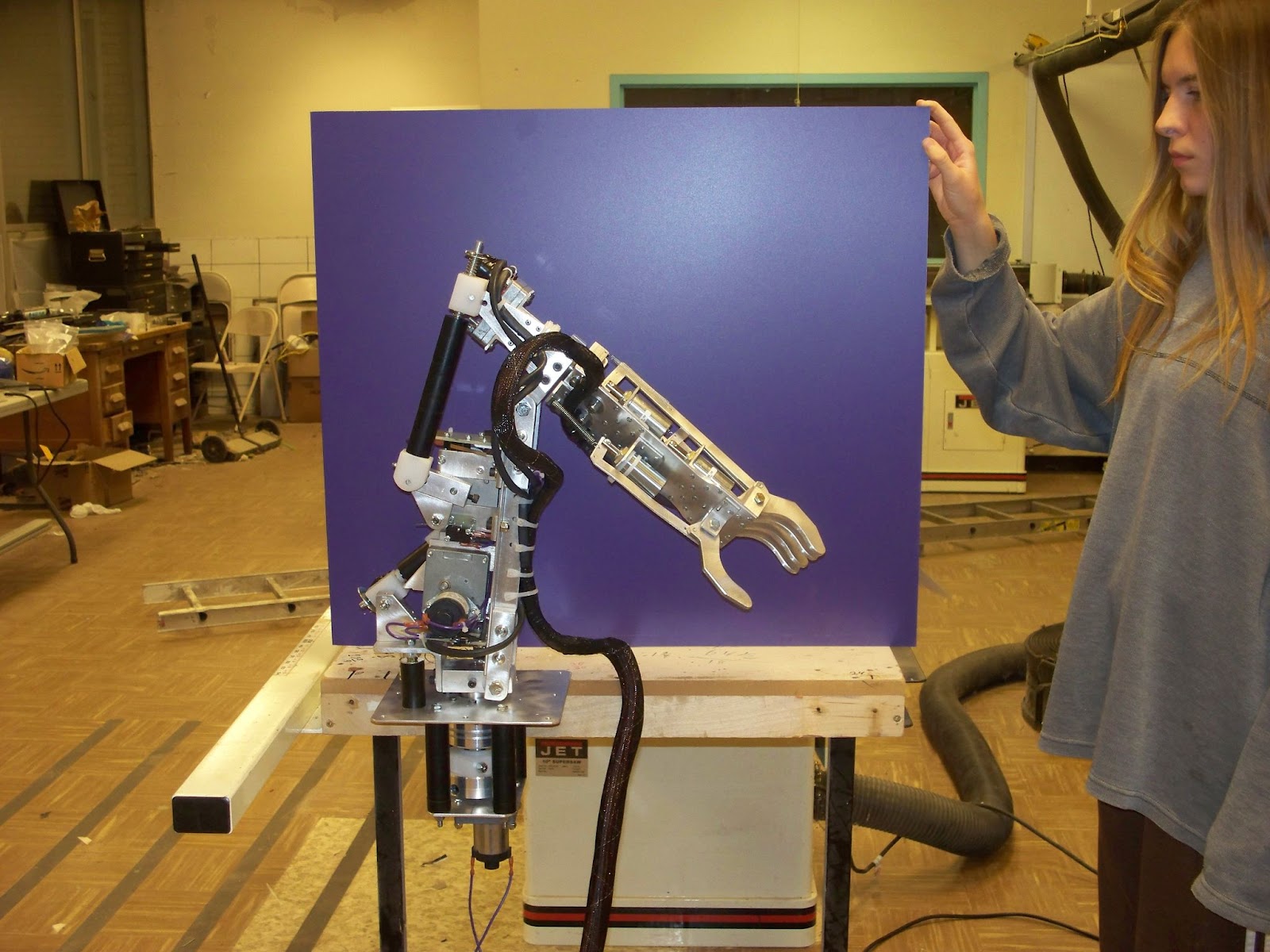
工作机器人手臂
第 1 步 - 开始将碎片放在一起

与强力计相连的冰棒木块
资料来源:可指导
第一步是得到一小块稳定的木头来创造手臂。当你在,选择任何你喜欢的机械设计。然后,用胶带(双面)将伺服胶粘在木头上。之后,用螺丝把伺服器扣在木头上。
至于主臂,你可以通过在小木头上安装你的强力计来达到这个目标。您可以使用帆布板作为基础来安装设置。
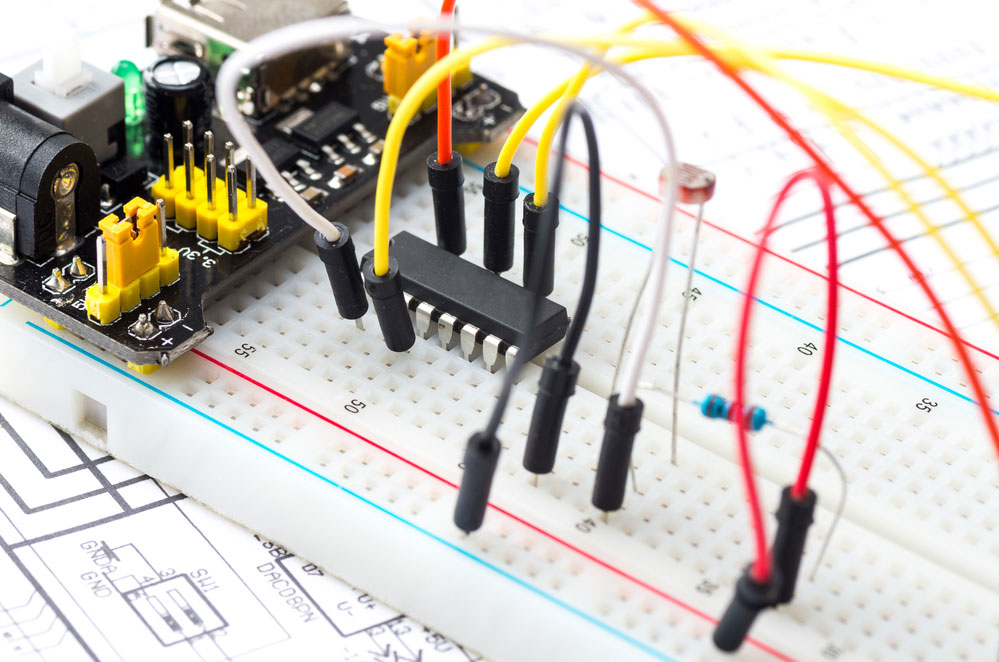
第 2 步 - 连接电线
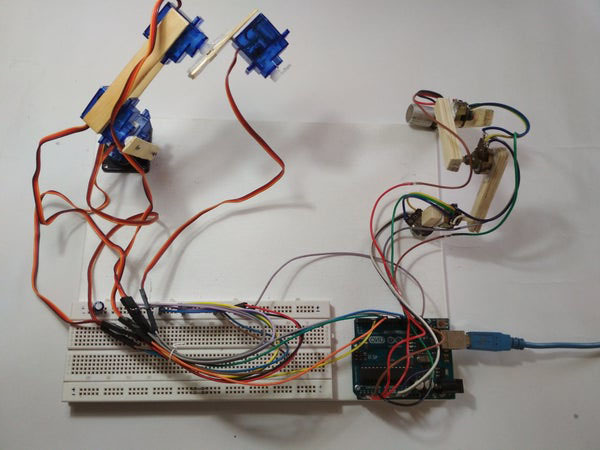
连接面包板上的电线和木块
资料来源:可指导
这里的目标是确保正确连接所有电线。第一步是得到你所有的伺服。然后,将伺服服务器与电源进行平行连接。即,当红线连接到正线时,您的黑线应转到 Gnd。
一旦你有,得到你的信号线(橙色或黄色),并把它连接到阿杜伊诺的PWM针。有了这个,你可以继续连接阿杜伊诺的Gnd并行。此外,您还需要将您的强力计连接到 +5V。
之后,将您的中间终端连接到阿杜伊诺模拟引脚。这就是说,你可以用数字引脚来调节伺服器,如10、9、6、5和3。此外,您可以使用 A0 到 A4(模拟引脚)从强力计输入。
此外,连接到 A0 的强力计有助于调节附着在引脚 3 上的伺服。此外,A1 上的锅控制连接到引脚 5 的伺服。
毫无疑问, 阿杜伊诺不为伺服者供电。但是,确保正确连接阿杜伊诺和 GND 以使手臂工作至关重要。
步骤 3 - 代码的时间
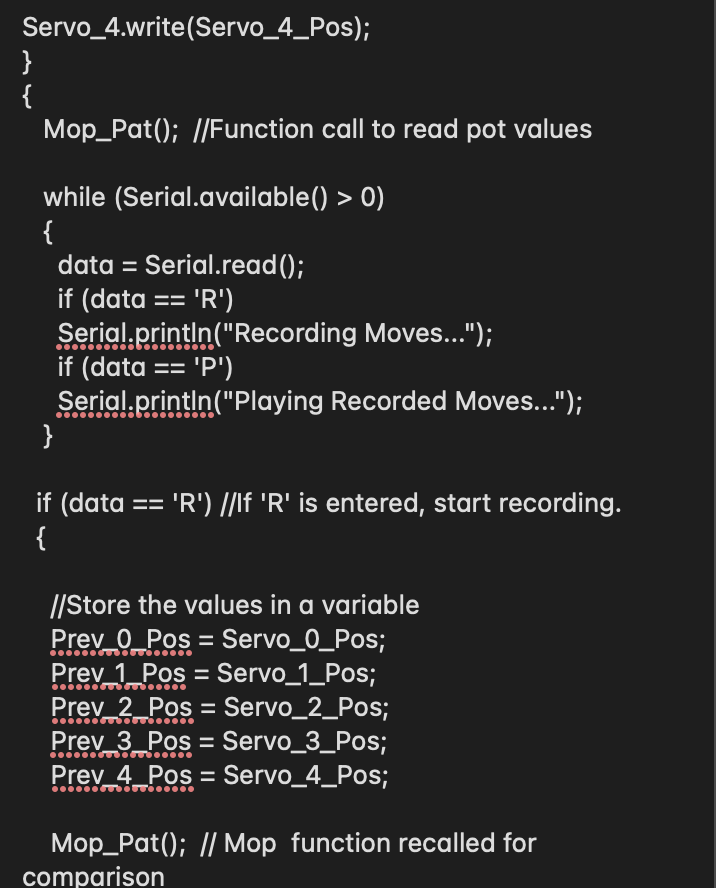
这个项目的编码过程非常简单。因此,您可以首先将强力计存储在阵列中。当您获得记录时,继续用"循环"来横向转。这样,伺服员将处理步骤。
换句话说,您可以通过说明全球所有重要变量来启动该过程。有了这个,就更容易理解和使用整个程序中的变量。
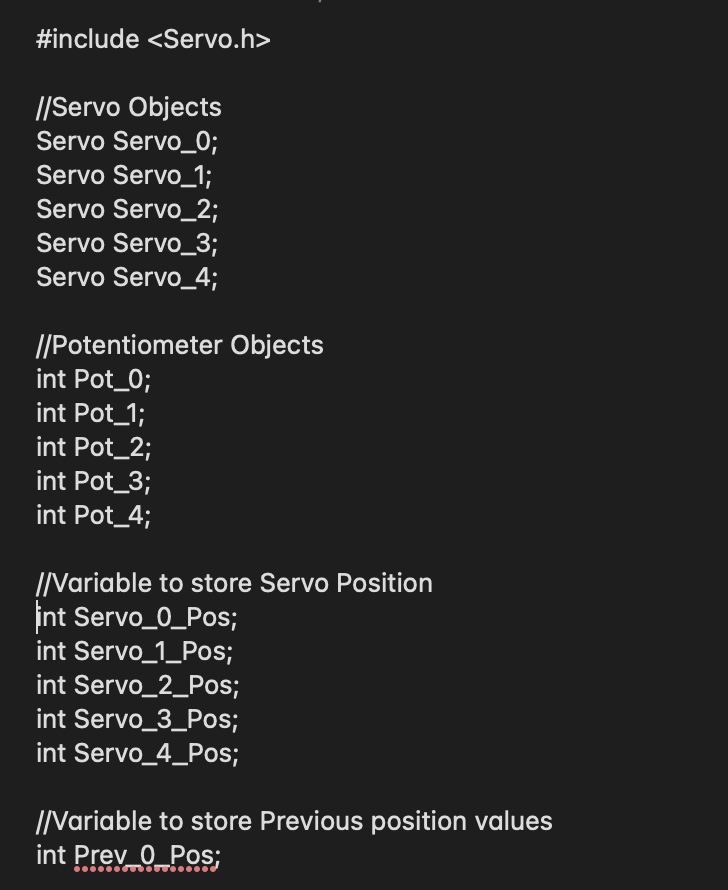
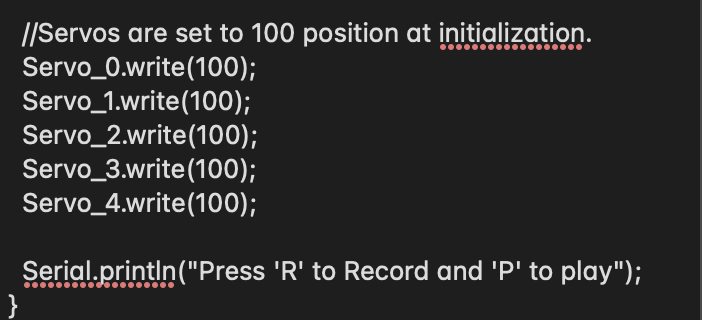
之后,继续执行启动第一次执行的主要功能。因此,您将提出一个设置功能,将突出显示设置的引脚及其功能。
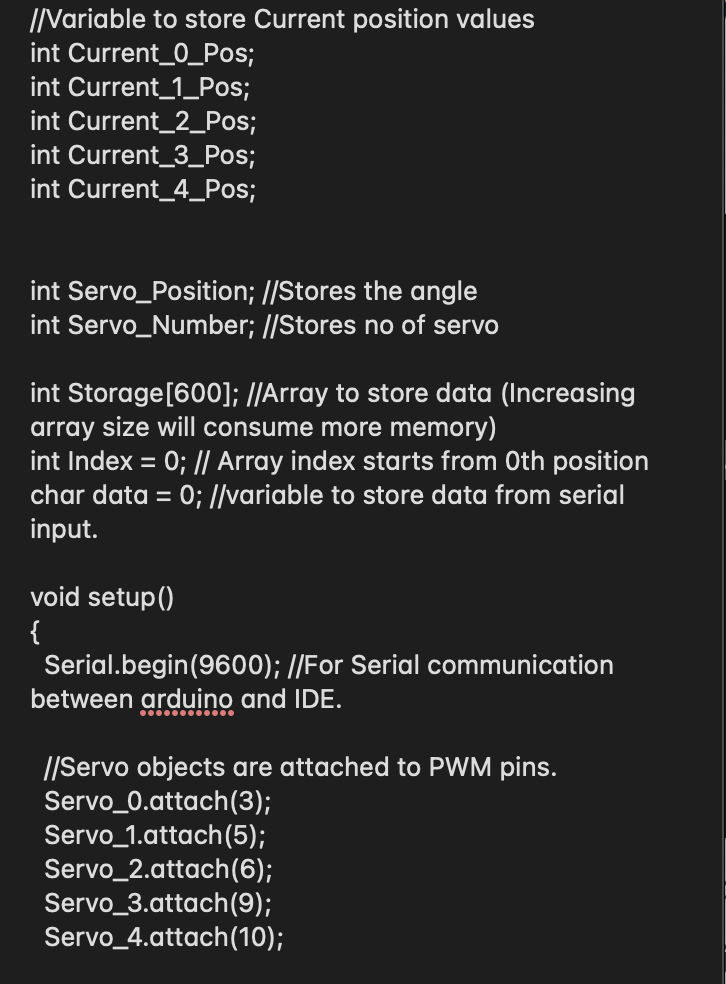
当您拥有该点时,下一个任务是使用模拟输入引脚来获取强力计的值。此外,模拟输入引脚有助于绘制有助于调节伺服物的值图。
现在,是时候命名用户定义的功能了。在下面的代码中,我们选择了Mop_Pat;
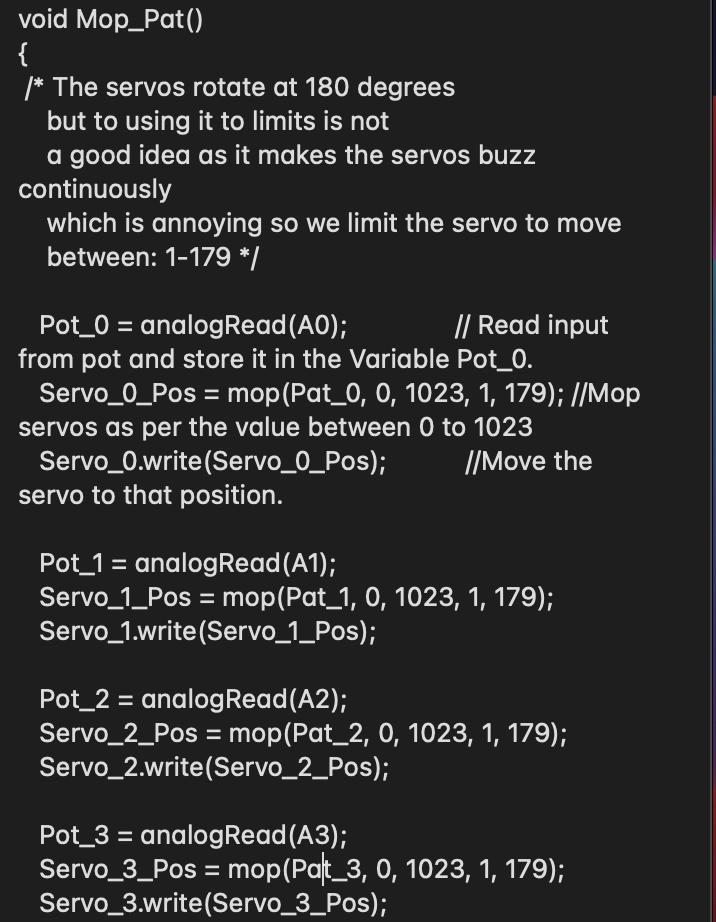
有了这个,你可以放下循环功能。完成代码后,您可以将其传输到 Arduino 板。
有了这个,你的机械臂就会起作用。此外,您可以在必要时对代码进行一些调整,以便操作更顺畅。
步骤 4 - 测试离开
完成将代码传输到板后,转到工具选项。在此选项中,请访问"串行监视器"。单击此功能时,它将帮助您重置 Arduino。它允许您使用主臂轻松控制机械臂。但是,此时无法记录任何移动。
因此,您必须在监视器上键入"R"才能记录所有移动。当您记录了所有动作后,键入"P"。此功能有助于重播所有动作。最好的部分是,只要您不重置板,伺服人员将继续执行这些动作。
其他阿杜伊诺机器人手臂项目创意
如果您觉得上面的项目过于基本,请随时尝试其他 Arduino 手臂机器人项目的想法,如:
带手势控制的机械臂(阿杜伊诺 + 基尼特)
手势控制机械臂
资料来源:维基共享资源
这个项目涉及用手势指挥机械臂。您可以用 Kinect 传感器捕捉手势。因此,工程师们开发了机械臂来模仿肘部、右臂、手部和肘部的运动。此外,他们还创建了此工具与伺服电机。
网络控制机器人手臂

网络控制机器人臂
网络控制的机器人手臂是另一个了不起的发明。该工具向您展示了与网络服务器协调手臂机器人的可能性。有趣的是,外部源为此设备供电,并且它使用大约六个伺服电机。
因此,要做到这一点,你必须研究它的工作流程,注意源代码,并了解系统架构。
农丘克控制阿尔杜伊诺机械臂
这个项目的想法以其独特性而引人注目。通过此项目,您将学习如何使用 Arduino Mega 对设备进行编程并有效地安装手臂机器人。此外,您可以使用任天堂Nunchuk来控制此工具。
最好的部分是,农丘克有很多传感器。此外,它随时可用,价格便宜。所以,如果你想建立这个机器人手臂,这是至关重要的,以获得你需要的工具和代码的列表。
安卓应用程序控制阿杜伊诺机器人手臂

生产线上的机械臂
这个机械臂是另一个任务项目,你可以选择。该设备通过安卓应用程序在 Arduino 旁边使用蓝牙模块。这就是说,一些工具,你需要建立这个机械臂包括一个通用电机,有一个蓝牙模块(HC-05)和一个阿杜伊诺巨型2560。
无线控制机器人手
如果您想知道构建机器人手需要什么,选择此项目是理想的选择。此外,它还教您如何控制此工具。此外,您还需要相关传感器、电池、Arduino 板和伺服电机等工具,以便使用无线手套构建此机器人手。
阿杜伊诺调酒师机器人手臂

阿杜伊诺调酒师机器人手臂
资料来源:世界建筑
调酒师机器人手臂是跳上的项目,如果你正在寻找一个有趣的项目,将打动客人。这个工具通常有一个机器人吉克捕捉器手臂。 此外, 它有一个阀门喷油器, 以提高它的调酒功能。因此,这个项目将很好地将饮料从容器中转移到您的玻璃杯中。
计算机鼠标控制阿杜伊诺机械臂
这个项目是理想的,如果你喜欢一个阿杜伊诺手臂项目,你可以控制你的电脑鼠标。最好的部分是,这个阿杜伊诺机械臂可以通过处理图片作出决定。如何?该工具在 Matlab 视觉软件的帮助下进行。
最后一句话
机械臂项目正在迅速成为世界上的一个东西。看到这些设备携带物品,根据类型精确平衡和堆叠物品,令人满意。它们有助于医疗应用和太空探索。

工厂中的机器人手臂
因此,这是一个极好的时间来建立这个工具的廉价版本 -特别是如果你不想处理任何重复的任务。你需要帮助开始吗?随时联系我们.
【上一篇:】IRF3205:通过 N 通道 MOSFET 数据表的指南
【下一篇:】高压调节器:最终指南
- 2026-07-01深圳新能源充电桩 PCBA 加工哪家好:2026 权威选型指南
- 2026-07-01深圳智能玩具 PCBA 加工哪家好:2026 权威选型指南
- 2026-06-27深圳 PCBA 加工厂家哪家好:2026 权威选型指南
- 2026-06-26深圳 PCBA 包工包料优质厂家推荐
- 2026-06-09PCBA 贴片加工厂家推荐(2026 权威指南)
- 2026-05-07深圳PCBA加工优选指南:5家具备IATF 16949资质的源头工厂深度盘点
- 2025-02-20深圳SMT贴片加工如何计算报价?
- 2026-07-21专业做汽车电子PCBA加工的工厂推荐|2026靠谱车规级厂家指南
- 2026-07-21PCBA 加急打样加工工厂推荐|2026靠谱高时效厂家选型指南
- 2026-07-20靠谱 PCBA 包工包料服务商推荐:2026高稳品质厂家甄选攻略